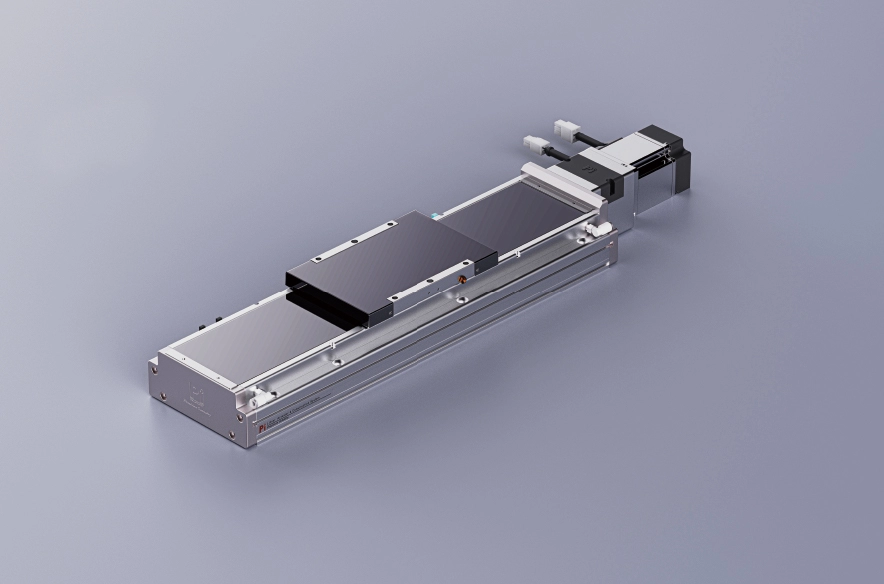
Motor Bahagian Bawah
Kebolehulangan:±0.005/0.01mm Beban Mendatar:110kg Beban Menegak:33kg Kelajuan Maksimum:250mm/s Julat Perjalanan:100-1050mm

 Lokasi semasa:Rumah > Syarikat > Berita > Berita terkini > Amalan Terbaik untuk Memilih Jadual Slaid Kedudukan Ketepatan untuk Aplikasi Robotik
Lokasi semasa:Rumah > Syarikat > Berita > Berita terkini > Amalan Terbaik untuk Memilih Jadual Slaid Kedudukan Ketepatan untuk Aplikasi Robotik Date: Feb 04 2026
Apabila bercakap tentang robotik, ketepatan adalah segala-galanya. Sama ada anda membina sistem pemasangan automatik, lengan robotik atau modul pergerakan tepat, jadual slaid penentududukan ketepatan yang anda pilih memainkan peranan penting dalam kejayaan aplikasi robotik anda. Jadual slaid dengan spesifikasi yang salah boleh menyebabkan ketidaktepatan, ketidakcekapan dan juga kegagalan sistem.
Memilih jadual slaid penentududukan ketepatan yang betul memerlukan pertimbangan teliti beberapa faktor, seperti kapasiti beban, ketepatan, kelajuan dan faktor persekitaran. Dalam artikel ini, kami akan membincangkan amalan terbaik untuk memilih jadual slaid yang akan membantu anda mencapai prestasi optimum dan kebolehpercayaan dalam sistem robotik anda.
Ketepatan dan kebolehulangan adalah teras kepada mana-mana aplikasi robotik. Sama ada anda meletakkan komponen, menjajarkan bahagian atau memastikan robot bergerak dengan ketepatan yang tepat, jadual slaid penentududukan ketepatan mesti memenuhi keperluan ketepatan khusus tugas anda.
Ketepatan merujuk kepada keupayaan untuk mencapai kedudukan yang tepat, biasanya diukur dalam mikron atau sub-mikron.
Kebolehulangan ialah keupayaan untuk kembali ke kedudukan yang sama dengan ralat minimum selepas beberapa kitaran, yang penting untuk sistem robotik yang memerlukan prestasi yang konsisten dari semasa ke semasa.
Amalan terbaik: Mulakan dengan menentukan tahap ketepatan dan kebolehulangan yang diperlukan oleh aplikasi robotik anda. Untuk tugasan yang memerlukan pergerakan halus, seperti pemasangan optik atau pengendalian bahagian kecil, cari jadual slaid yang menawarkan ketepatan sub-mikron. Untuk tugas yang kurang menuntut, seperti pengendalian bahan, ketepatan tahap mikron mungkin mencukupi.
Dalam robotik, jadual slaid selalunya menyokong bukan sahaja robot itu sendiri tetapi juga muatan tambahan seperti alatan, bahan kerja atau komponen jentera. Kapasiti beban jadual slaid penentududukan ketepatan harus selesa menyokong kedua-dua beban statik dan dinamik yang akan digunakan semasa operasi.
Terdapat dua faktor utama yang perlu dipertimbangkan:
Beban Statik: Berat yang boleh dikendalikan oleh meja apabila ia tidak bergerak.
Beban Dinamik: Berat yang boleh disokong oleh meja apabila ia bergerak. Beban yang bergerak boleh menghasilkan daya tambahan disebabkan oleh pecutan, nyahpecutan dan inersia, jadi ini adalah pertimbangan penting.
Amalan terbaik: Kira jumlah berat komponen sistem robotik anda akan bergerak dan pastikan kapasiti beban jadual slaid melebihi ini dengan margin yang mencukupi. Selain itu, pertimbangkan daya dinamik yang terlibat semasa pergerakan pantas atau berhenti. Pilih jadual slaid yang mengekalkan kestabilan dan ketepatan di bawah beban, dengan lenturan atau peralihan yang minimum.
Kelajuan dan julat perjalanan adalah faktor kritikal apabila memilih jadual slaid penentududukan ketepatan untuk aplikasi robotik. Bergantung pada reka bentuk dan fungsi sistem anda, anda mungkin memerlukan jadual untuk bergerak dengan cepat pada jarak yang jauh, atau anda mungkin memerlukan pergerakan yang lebih perlahan dan lebih terkawal untuk tugasan berketepatan tinggi.
Kelajuan: Ini merujuk kepada seberapa cepat jadual boleh bergerak di sepanjang paksinya. Untuk aplikasi yang memerlukan kedudukan pantas, seperti talian pemasangan automatik, kelajuan adalah pertimbangan yang penting.
Julat Perjalanan: Ini ialah jarak maksimum yang boleh dilalui oleh jadual slaid. Pastikan jadual slaid menyediakan panjang lejang yang mencukupi untuk memenuhi keperluan sistem robotik anda.
Amalan terbaik: Menilai keperluan aplikasi robotik anda. Untuk tugasan berkelajuan tinggi, seperti operasi pilih-dan-tempat robotik, pilih jadual slaid bermotor dengan penilaian kelajuan tinggi. Untuk tugasan yang memerlukan pergerakan yang lebih perlahan dan lebih terkawal, seperti penempatan komponen ketepatan, pilih jadual yang boleh beroperasi dengan kadar pecutan dan nyahpecutan yang rendah. Juga, sahkan bahawa julat perjalanan mencukupi untuk julat penuh pergerakan sistem anda.
Jenis penggerak yang digunakan untuk mengalihkan jadual slaid boleh memberi kesan yang ketara kepada prestasi sistem robotik anda. Jenis penggerak yang paling biasa untuk jadual slaid ketepatan ialah sistem manual, bermotor dan pneumatik/hidraulik.
Penggerakan Manual: Walaupun sistem manual mudah dan menjimatkan kos, mereka mungkin tidak sesuai untuk aplikasi robotik berkelajuan tinggi atau automatik. Mereka lebih sesuai untuk tugasan volum rendah, sekali sahaja di mana campur tangan manusia boleh diterima.
Penggerakan Bermotor: Untuk kebanyakan aplikasi robotik, jadual slaid bermotor lebih diutamakan. Mereka menawarkan gerakan boleh atur cara, boleh diulang dan boleh disepadukan ke dalam sistem automatik. Pilih antara motor stepper, motor servo atau motor DC berdasarkan keperluan kelajuan dan kawalan yang anda perlukan.
Penggerak Pneumatik atau Hidraulik: Sistem pneumatik atau hidraulik sering digunakan dalam aplikasi berdaya tinggi, tugas berat, seperti robot industri yang memerlukan pergerakan lancar dan berkuasa.
Amalan terbaik: Jika sistem robotik anda memerlukan ketepatan tinggi, kelajuan dan kebolehulangan, pilih jadual slaid bermotor. Pertimbangkan motor servo atau motor stepper untuk kawalan dan penyepaduan terbaik dengan sistem automatik. Jika aplikasi anda memerlukan pergerakan licin dan daya tinggi, sistem pneumatik atau hidraulik mungkin sesuai.
Dalam banyak aplikasi robotik, jadual slaid hanyalah satu bahagian daripada sistem yang lebih besar dan lebih kompleks. Keupayaan untuk menyepadukan jadual slaid dengan lancar dengan komponen lain, seperti lengan robot, sistem kawalan dan sistem penglihatan, adalah penting untuk mencapai prestasi optimum.
Penyepaduan Perisian: Pastikan jadual slaid serasi dengan perisian kawalan robot anda, membolehkan komunikasi lancar dan koordinasi pergerakan.
Keserasian Mekanikal: Semak sama ada jadual slaid boleh disepadukan dengan mudah dengan bahagian lain sistem anda, seperti lengan robot atau pencengkam.
Amalan terbaik: Pilih jadual slaid yang menawarkan penyepaduan mudah dengan sistem sedia ada robot anda, termasuk keserasian dengan protokol komunikasi biasa seperti Ethernet atau RS-232. Cari model yang menyokong kawalan boleh atur cara dan boleh disegerakkan dengan pergerakan robot anda dan urutan tugas.
Persekitaran operasi sistem robotik memainkan peranan penting dalam memilih jadual slaid yang betul. Sesetengah aplikasi robotik digunakan dalam keadaan yang teruk di mana habuk, kelembapan, suhu melampau atau pendedahan bahan kimia boleh menjejaskan prestasi dan umur panjang.
Keperluan Bilik Bersih: Jika sistem anda beroperasi dalam bilik bersih atau persekitaran terkawal lain, pastikan meja slaid kalis habuk dan diperbuat daripada bahan yang tidak akan mengeluarkan zarah.
Rintangan Kakisan: Untuk aplikasi dalam persekitaran basah atau sarat kimia, seperti pemprosesan makanan atau robotik perubatan, pilih bahan seperti keluli tahan karat atau aluminium anod untuk rintangan kakisan.
Amalan terbaik: Pastikan meja slaid diperbuat daripada bahan tahan kakisan jika anda menjangkakan ia terdedah kepada persekitaran yang keras. Cari galas tertutup atau sistem pelincir sendiri untuk mengurangkan kesan habuk, lembapan atau bahan kimia pada prestasi.
Sistem robotik yang beroperasi 24/7 memerlukan peralatan yang bukan sahaja tepat tetapi juga tahan lama. Keperluan penyelenggaraan meja slaid perlu diambil kira untuk memastikan ia kekal beroperasi untuk jangka masa panjang. Sistem penyelenggaraan rendah dengan komponen pelincir sendiri dan galas tertutup boleh mengurangkan masa henti dan meningkatkan kebolehpercayaan.
Amalan terbaik: Cari meja slaid yang memerlukan penyelenggaraan yang minimum, terutamanya jika sistem robotik anda berjalan secara berterusan. Pilih model dengan sistem tertutup yang melindungi komponen dalaman daripada kotoran dan habuk. Pembersihan, pelinciran dan pemeriksaan tetap akan membantu memastikan umur panjang.
Memilih jadual slaid penentududukan ketepatan yang betul untuk aplikasi robotik adalah penting untuk prestasi, kebolehpercayaan dan kecekapan sistem anda. Dengan menilai dengan teliti faktor seperti ketepatan, kapasiti beban, jenis penggerak dan pertimbangan alam sekitar, anda boleh memilih jadual slaid yang meningkatkan prestasi keseluruhan sistem robotik anda.
Ikuti amalan terbaik ini untuk memastikan bahawa jadual slaid yang anda pilih memenuhi keperluan tepat aplikasi robotik anda, membolehkan operasi yang lebih lancar, ketepatan yang lebih baik dan ketahanan yang lebih baik dari semasa ke semasa. Dengan adanya jadual slaid yang betul, sistem robotik anda akan dilengkapi untuk mengendalikan permintaan automasi moden dan tugas ketepatan.